
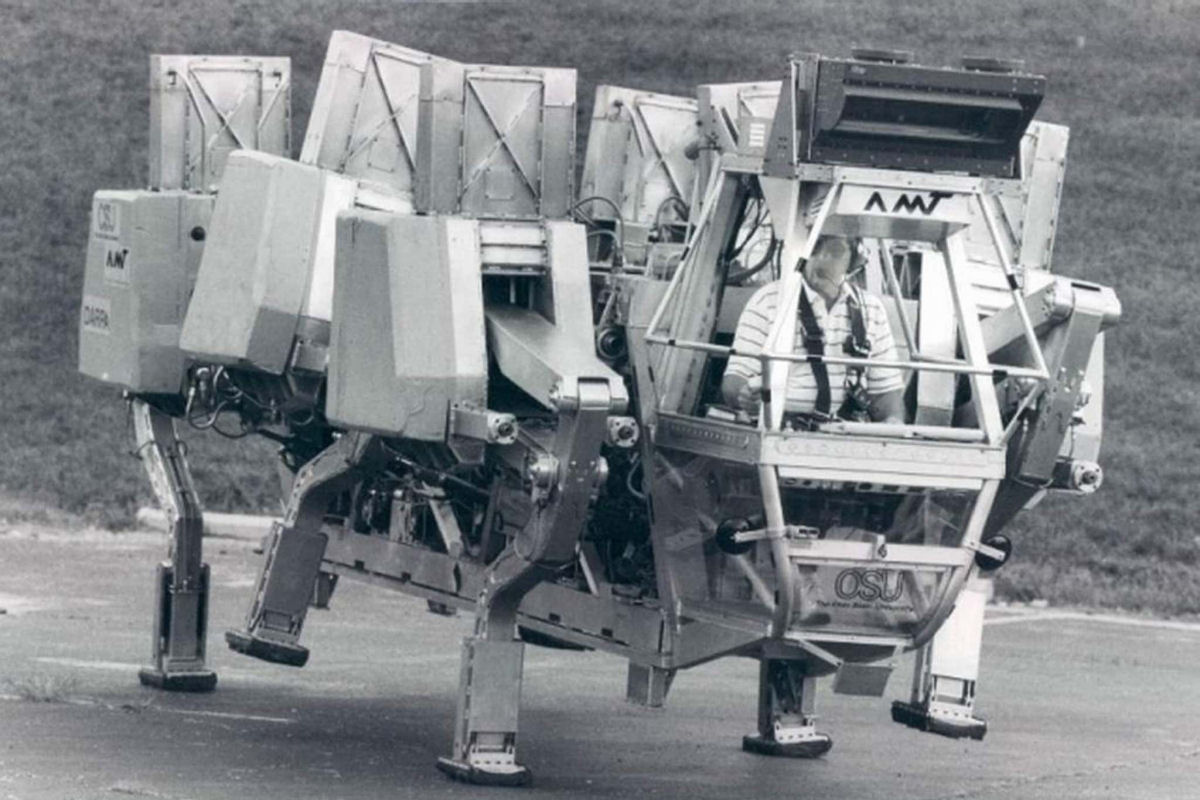
 | O Exército dos EUA adora seus brinquedos e paga muito dinheiro por eles, então fica naturalmente desapontado quando não pode levar seus aparelhos caros aonde quer que vá. Na década de 1980, o Exército calculou que cerca de metade da massa de terra do planeta era intransitável por veículos convencionais sobre rodas ou esteiras. Isso era claramente um problema, então ele fez uma parceria com a Universidade Estadual de Ohio e alguns contratados externos para desenvolver o Veículo com Suspensão Adaptável (VSA): um robô hidráulico de seis pernas do tamanho de um caminhão comandado por um operador solo. |
Embora fosse muito complexo e igualmente lento, foi uma tentativa bem-sucedida de tirar a locomoção com pernas artificiais das páginas de ficção científica e colocá-la na realidade, adiantando a Boston Dynamics no assustador jogo de animais mecanizados por boas duas décadas.
Financiado pela Agência de Projetos de Pesquisa Avançada de Defesa (DARPA), o projeto VSA começou a ser criado em janeiro de 1981. Sob a liderança de Robert McGhee e Kenneth Waldron -ambos professores da universidade- a máquina foi desenvolvida ao longo dos nove anos seguintes. Ao contrário de outros experimentos mais rudimentares que vieram antes, ao VSA incorporava uma série de 17 computadores para garantir que o operador do veículo não ficasse física e mentalmente exausto após um dia gerenciando cada passo dado pelas seis pernas.
Lembre-se de que esses computadores eram incrivelmente deficientes para os padrões atuais. Essas caixas retangulares maciças que você vê acima dos ombros metálicos do veículo não são algum tipo de reservatório hidráulico, cada uma delas abriga um dos seis computadores Intel "86/30" 128k de 8 bits que controlavam as pernas.

O restante, 11 no total, fazia várias outras tarefas, como controlar os monitores CRT dentro da cabine, analisar todos os dados coletados nas pernas e os sensores de pressão nos pés e determinar o melhor pé para a máquina com base nos dados de um telêmetro de varredura de 128x128 pixels montado acima da cabine. Todos esses dados eram então interpretados pelo software operacional do veículo, escrito em Pascal e consistindo de 150.000 linhas de código-fonte, para fazer o VSA andar.
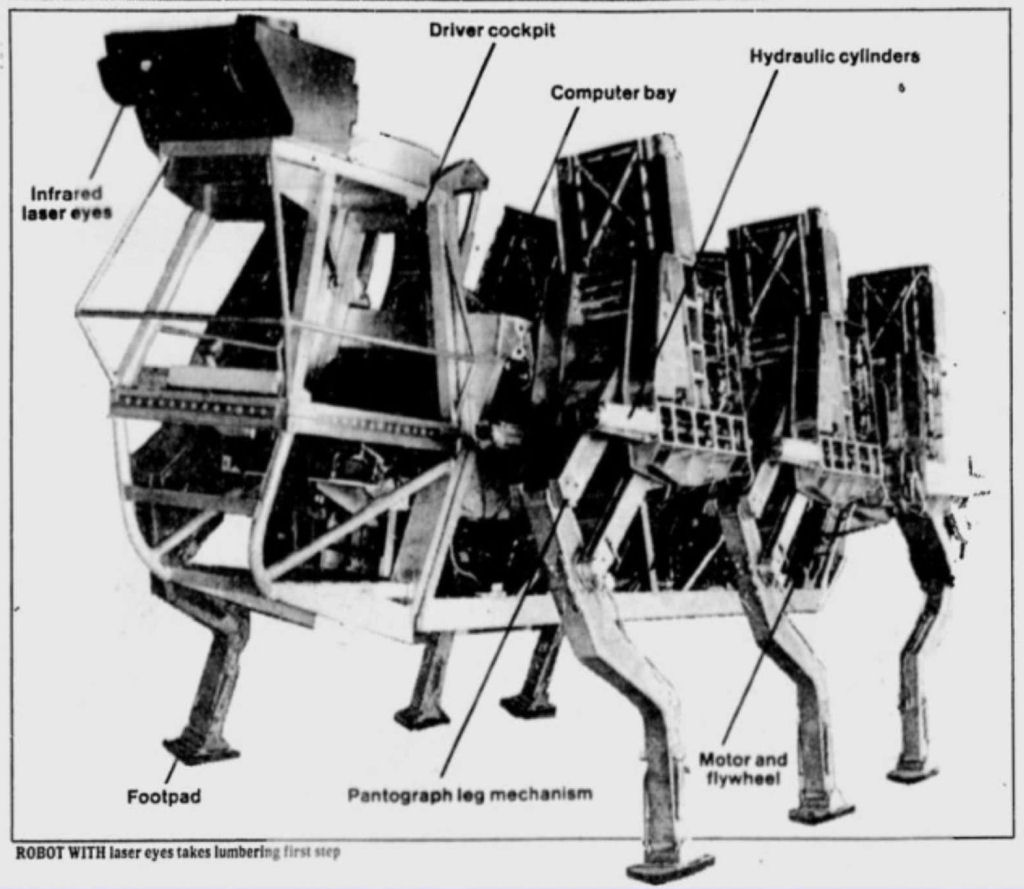
É aí que termina o elemento computadorizado e começam os elementos mecânicos e humanos. O veículo era descrito como sendo mais "supervisionado" do que realmente dirigido. O operador instruía o VSA para onde ir com um teclado e um joystick e, em seguida, ele partia nessa direção. Está implícito em alguma literatura que o objetivo final era tornar esta máquina autônoma, no entanto, a equipe da universidade estava claramente limitada pelo poder de processamento na época, embora recebesse um milhão de dólares da DARPA todos os anos para financiar o projeto .
Esse dinheiro não era usado apenas nos computadores do veículo, é claro, porque os sistemas mecânicos para fazer o VSA andar eram igualmente complexos.

Graças a esse sistema de propulsão complexo, o veículo podia andar a uma velocidade máxima de 13 quilômetros por hora, embora se diga que a esse ritmo o tornava uma viagem chocante. A velocidade de cruzeiro estava perto de seis quilômetros por hora. Ele também podia fazer mais do que apenas caminhar e correr. Ele tinha seis modos de direção diferentes, incluindo utilitário (um modo de diagnóstico), passada de precisão, manobra próxima, seguir o líder, seguir o terreno e cruzeiro.
Dito isso, a baixa velocidade de cruzeiro limitava a praticidade do VSA. Essa velocidade não era limitada apenas pela quantidade de socos que o operador podia suportar, mas também por seu peso. Com 2.700 kg, era bem pesado e podia carrega uma carga útil de apenas 250 kg.

Por último, parafernália ele tinha 5 metros de comprimento, 2,5 de largura e 3 de altura, enfim, um grande veículo para transportar uma carga tão pequena. Apesar de ser capaz de passar por cima de obstáculos verticais de até 2 metros pés e atravessar trincheiras de até 7 metros, os militares gradualmente perderam o interesse e o programa foi encerrado em 1990.
O MDig precisa de sua ajuda.
Por favor, apóie o MDig com o valor que você puder e isso leva apenas um minuto. Obrigado!
Meios de fazer a sua contribuição:
- Faça um doação pelo Paypal clicando no seguinte link: Apoiar o MDig.
- Seja nosso patrão no Patreon clicando no seguinte link: Patreon do MDig.
- Pix MDig: 461.396.566-72 ou luisaocs@gmail.com
- Depósito direto em conta corrente do Banco do Brasil: Agência: 3543-2 / Conta corrente: 17364-9
- Depósito direto em conta corrente da Caixa Econômica: Agência: 1637 / Conta corrente: 000835148057-4 / Operação: 1288
Faça o seu comentário
Comentários