
 | Parte da versatilidade da capacidade da mão humana de pegar quase tudo vem da capacidade de aplicar um toque suave a objetos frágeis ou de formas estranhas. Isso é algo com que os robôs lutam, especialmente quando operam de forma autônoma, e infelizmente a solução pode estar em um design de garra pouco ortodoxo. Parece apropriado que pesquisadores da Escola de Engenharia e Ciências Aplicadas John A. Paulson de Harvard estejam revelando seu novo design de garra tão próximo do Halloween, pois se inspira em estranhas criaturas marinhas como polvos e águas-vivas. |
Inspirar-se em animais para construir robôs projetados para realizar uma tarefa específica está longe de ser uma ideia nova. A mão humana pode ser incrivelmente hábil, mas também é incrivelmente difícil replicar suas habilidades para um robô. Os tentáculos, por outro lado, não são, e é sua simplicidade que é a chave para o funcionamento desse design de garra.
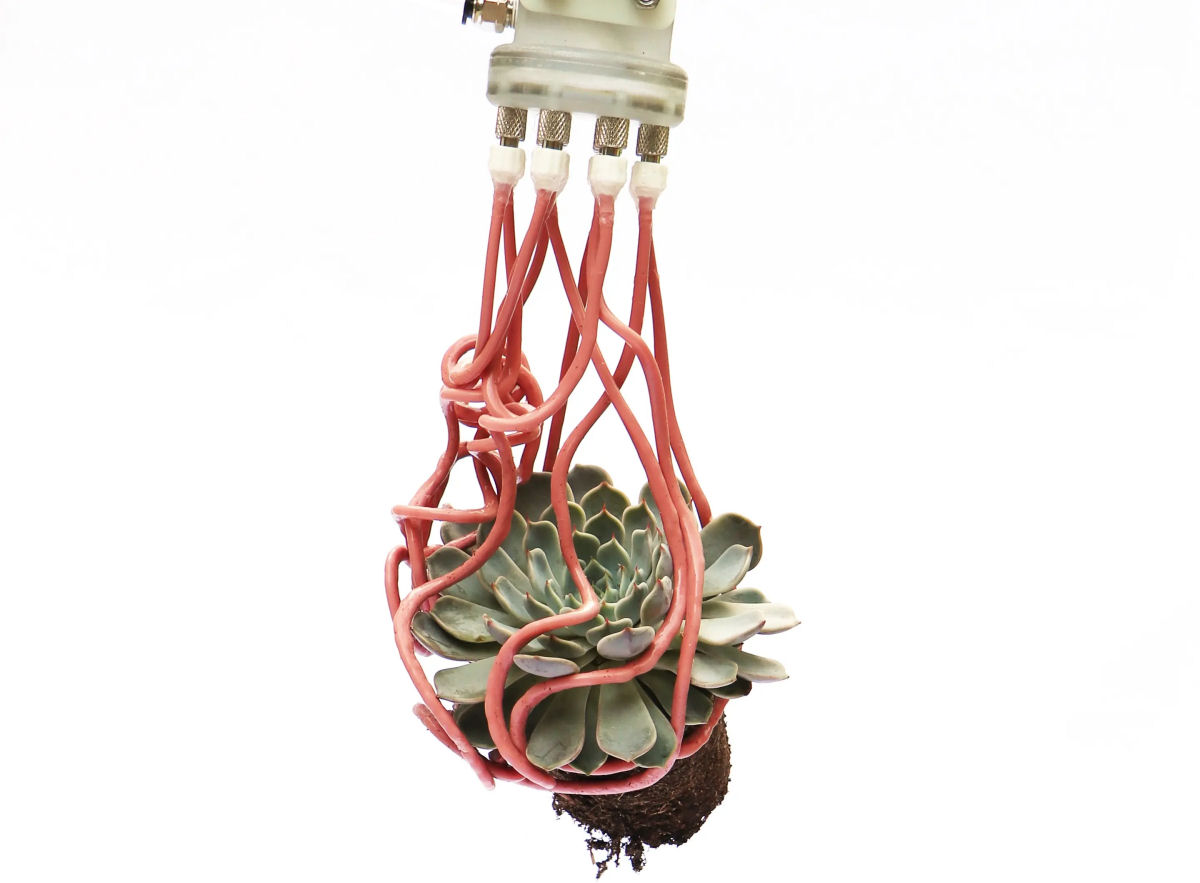
Os tentáculos artificiais são feitos de tubos de borracha ocos de trinta centímetros, com um lado ligeiramente mais grosso que o outro. Quando vazios, eles ficam flácidos e aparentemente sem vida, pendurados, mas quando cheios de ar, pressurizam e enrolam como um rabo de cavalo.
A ação de enrolamento é mais ou menos completamente aleatória, então se você colocar um objeto próximo a um dos tentáculos enquanto ele se enrola sob pressão, há uma chance de que ele o enrole e uma chance de não. Mas coloque um objeto próximo a um grande grupo desses tentáculos, e é quase garantido que pelo menos alguns deles se enrolarão ao redor do objeto enquanto se enrolam, e quanto mais esses tentáculos se emaranham, mais forte se torna o aperto.
Coletivamente, o grupo de tentáculos fornece um forte aperto em um objeto, mas individualmente, cada tentáculo tem um aperto relativamente fraco, o que significa que há pouco risco de um objeto frágil ser danificado no processo. E como os tentáculos só fornecem um aperto seguro quando estão cheios de ar, simplesmente liberar essa pressão também liberará o que está sendo retido.
Testado usando experimentos do mundo real com o protótipo e simulações, os pesquisadores acreditam que o novo design da garra pode ser uma alternativa eficaz ao que é usado hoje para lidar com tudo, desde plantas, frutas e vegetais até vidros delicados.
No entanto, o design ainda tem alguns problemas que precisarão ser resolvidos antes que algo assim apareça em fábricas ou armazéns. A natureza aleatória dos emaranhados significa que os objetos que foram apanhados não podem ser reposicionados com a mesma precisão e exatidão que as garras a vácuo usadas hoje para manusear objetos delicados, representando um grande desafio para tarefas automatizadas, como empacotar ou preparar uma peça para a próxima estágio em uma linha de montagem automatizada.
O MDig precisa de sua ajuda.
Por favor, apóie o MDig com o valor que você puder e isso leva apenas um minuto. Obrigado!
Meios de fazer a sua contribuição:
- Faça um doação pelo Paypal clicando no seguinte link: Apoiar o MDig.
- Seja nosso patrão no Patreon clicando no seguinte link: Patreon do MDig.
- Pix MDig: 461.396.566-72 ou luisaocs@gmail.com
- Depósito direto em conta corrente do Banco do Brasil: Agência: 3543-2 / Conta corrente: 17364-9
- Depósito direto em conta corrente da Caixa Econômica: Agência: 1637 / Conta corrente: 000835148057-4 / Operação: 1288
Faça o seu comentário
Comentários