
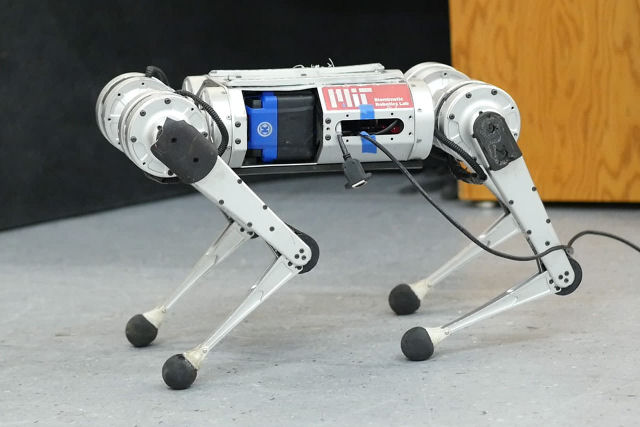
 | Para fazer que seu Mini Chita esteja melhor equipado para se mover habilmente por diferentes terrenos, os pesquisadores de robótica do CSAIL do MIT utilizaram simulações impulsionadas por inteligência artificial para ensinar rapidamente ao robô a adaptar seu estilo de caminhada segundo seja necessário. Isso incluiu aprender a correr, o que resultou em uma nova forma de andar que permite que o robô se mova mais rápido do que nunca. Por muito que os projetistas de robôs se esforcem por desenhar um robô para manejar qualquer situação que possa experimentar no mundo real, é uma tarefa impossível. |

O mundo é infinitamente caótico. E quando simplesmente caminha por uma calçada, um robô pode enfrentar uma grande quantidade de obstáculos, desde pavimento liso até áreas cobertas de cascalho solto ou todos os anteriores, um depois de outro. É por isso que os robôs bípedes e inclusive os quadrúpedes costumam andar de forma muito lenta e cuidadosa. Estão desenhados e programados para esperar o pior dos casos relativo ao terreno pelo que navegam, e procedem com muito cuidado, inclusive quando caminham sobre superfícies lisas sem escombros nem obstáculos.
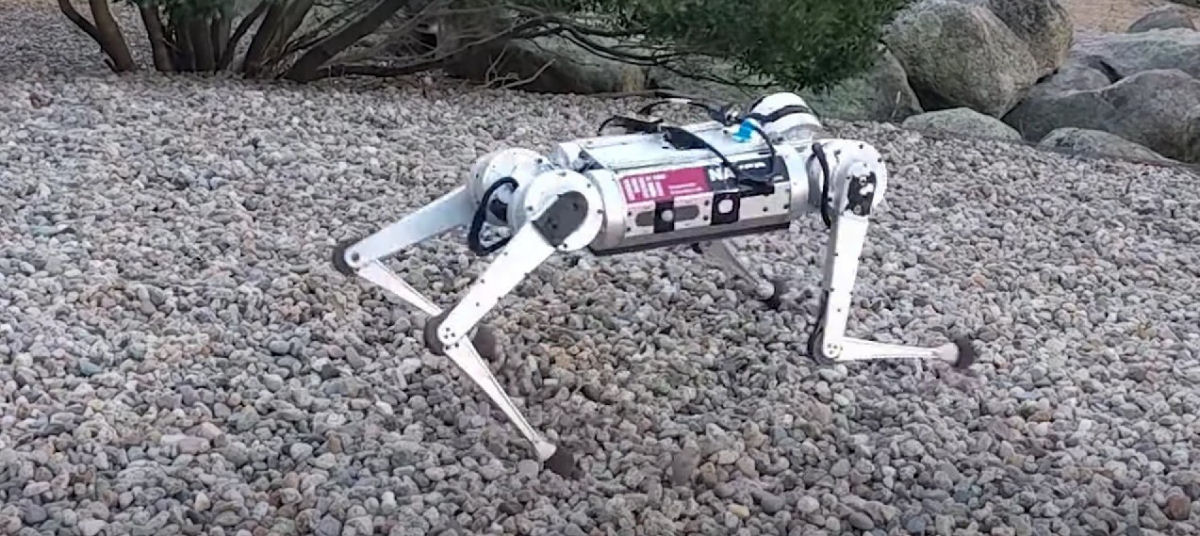
A adaptabilidade é a chave para fazer com que os robôs se movam mais rápido e com mais confiança em diferentes terrenos; mudando sua forma de andar e sua velocidade quando identificam uma transição de superfícies mais seguras como o pavimento, a materiais como cascalho e rochas que requerem um enfoque mais cuidadoso e mais lento. A programação de um robô pode ser modificada e atualizar manualmente cada vez que se encontra com um novo terreno que não pode navegar com sucesso, mas esse é um processo que requer muito tempo e que inevitavelmente faz com que o robô falhe cada vez que encontra com algo novo.
Um melhor enfoque é criar um robô que possa aprender por tentativa e erro, e que possa modificar e alterar automaticamente seu comportamento e movimentos por si mesmo quando se encontra com um novo terreno. O problema com esse enfoque é que, assim como uma criança pequena, não é seguro deixar que um robô simplesmente faça qualquer loucura para ter todas estas experiências de aprendizagem por si só. Um dos casos de uso mais promissores para os robôs é poder enviar uma máquina com a mesma capacidade que um humano a áreas que não são seguras para os humanos, e se necessitar uma babá constante significa que um robô não pode cumprir esse papel.

Para superar este problema essa infância cheia de experiências de aprendizagem aleatórias pelas quais passam a maioria dos humanos e acelerar o desenvolvimento do Mini Chita, os pesquisadores do MIT CSAIL recorreram à inteligência artificial e as simulações. Em apenas 3 horas, o robô experimentou 100 dias de aventuras virtuais em uma variedade diversa de terrenos, e aprendeu inumeráveis técnicas novas para modificar sua forma de andar de modo que ainda possa se mover de maneira efetiva do ponto A no ponto B sem importar o que tenha sob seus pés ou patas.
É possível que o Mini Chita não seja necessariamente capaz de reconhecer o que é cascalho solto que constantemente faz com que perca o equilíbrio, ou o gelo que faz com que seus pés escorreguem. Mas ao monitorar constantemente seus movimentos pode saber quando não está caminhando tão efetivamente como poderia, e em função do que fazem suas pernas, agora pode adaptar seus movimentos para se assegurar de seguir avançando. Essas adaptações podem inclusive compensar o possível baixo rendimento dos componentes do robô como resultado de danos ou sobrecarga.
Há outra razão pela qual os robôs não correm, e não tem nade a ver com os pesquisadores preocupados por danificar uma máquina personalizada que possivelmente custa centenas de milhares de dólares. Correr requer que um robô empurre seus diversos componentes, como motores elétricos e servos, até os limites de sua faixa operacional, momento no qual podem começar a atuar com diferentes comportamentos que são tão difíceis de predizer como o que poderia passar a um robô que atravessa gelo escorregadio. Mas da mesma maneira que o Mini Chita agora pode se adaptar a diferentes terrenos, também pode se adaptar a como funcionam seus próprios componentes, o que lhe permite funcionar de maneira mais efetiva.
Talvez não seja o mais elegante ver quando se move a altas velocidades, mas o Mini Chita atingiu uma nova velocidade máxima de 3,9 m/s, ou um pouco mais de 14 km/h, que é mais rápido do que pode correr um ser humana em média. No entanto, o novo enfoque não se trata só de ensinar os robôs a correr. Seria possível ensinar rapidamente às mãos dos robôs a manejar de maneira segura milhares de objetos diferentes que nunca antes tinham tocado fisicamente, e também seria possível ensinar aos drones autônomos a voar em condições climáticas adversas através de simulações seguras em vez de enviar ao mundo real para aprender por tentativa e erro.
O MDig precisa de sua ajuda.
Por favor, apóie o MDig com o valor que você puder e isso leva apenas um minuto. Obrigado!
Meios de fazer a sua contribuição:
- Faça um doação pelo Paypal clicando no seguinte link: Apoiar o MDig.
- Seja nosso patrão no Patreon clicando no seguinte link: Patreon do MDig.
- Pix MDig: 461.396.566-72 ou luisaocs@gmail.com
- Depósito direto em conta corrente do Banco do Brasil: Agência: 3543-2 / Conta corrente: 17364-9
- Depósito direto em conta corrente da Caixa Econômica: Agência: 1637 / Conta corrente: 000835148057-4 / Operação: 1288
Faça o seu comentário
Comentários