
 | A maioria das aves pode navegar perfeitamente entre ambientes aéreos e terrestres. Enquanto os membros anteriores evoluíram para asas principalmente para o voo, os membros posteriores desempenham diversas funções, como andar, pular, saltar e decolar para transições para o voo. Essas capacidades inspiraram engenheiros a almejar multimodalidade semelhante em robôs aéreos, expandindo sua gama de aplicações em diversos ambientes. No entanto, ainda há desafios na reprodução da locomoção multimodal, com cinemática distinta e características propulsivas, como andar e pular, preservando ao mesmo tempo a massa leve para o voo. |

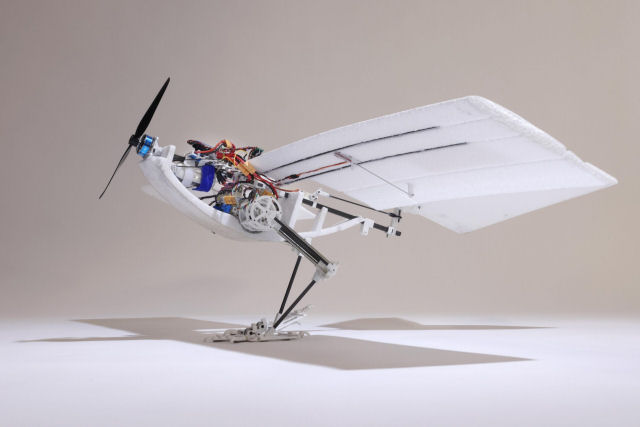
Essa compensação entre complexidade mecânica e versatilidade limita a maioria dos robôs aéreos existentes a apenas um modo locomotor adicional. Um novo projeto de drone dos pesquisadores da Escola Politécnica Federal de Lausanne (EPFL), na Suíça, chamado RAVEN (Robotic Avian-inspired Vehicle for multiple ENvironments, usa suas pernas robóticas multifuncionais inspiradas em pássaros para saltar rapidamente para o voo, andar no chão e saltar sobre obstáculos e lacunas semelhantes à locomoção multimodal dos pássaros.
O design do RAVEN visa maximizar a diversidade da marcha enquanto minimiza a massa. Inspirado pelas proporções das pernas dos pássaros (e longas observações de corvos no campus da EPFL), os pesquisadores projetaram um conjunto de pernas aviárias multifuncionais e personalizadas para um drone de asa fixa. Ele usou uma combinação de modelos matemáticos, simulações de computador e iterações experimentais para atingir um equilíbrio ideal entre a complexidade da perna e o peso geral do drone (0,62 kg).
A perna resultante mantém os componentes mais pesados próximos ao "corpo", enquanto uma combinação de molas e motores imita os poderosos tendões e músculos aviários. Pés leves inspirados em aves, compostos por duas estruturas articuladas, alavancam uma articulação elástica passiva que suporta diversas posturas para caminhar, pular e saltar.
Robôs anteriores projetados para andar eram pesados demais para pular, enquanto robôs projetados para pular não tinham pés adequados para andar. O design exclusivo do RAVEN permite que ele ande, atravesse buracos no terreno e até pule em uma superfície elevada de 26 centímetros de altura.
Os cientistas também experimentaram diferentes modos de iniciação de voo, incluindo decolagem em pé e em queda, e descobriram que pular para o voo fazia o uso mais eficiente da energia cinética (velocidade) e da energia potencial (ganho de altura).
O MDig precisa de sua ajuda.
Por favor, apóie o MDig com o valor que você puder e isso leva apenas um minuto. Obrigado!
Meios de fazer a sua contribuição:
- Faça um doação pelo Paypal clicando no seguinte link: Apoiar o MDig.
- Seja nosso patrão no Patreon clicando no seguinte link: Patreon do MDig.
- Pix MDig: 461.396.566-72 ou luisaocs@gmail.com
- Depósito direto em conta corrente do Banco do Brasil: Agência: 3543-2 / Conta corrente: 17364-9
- Depósito direto em conta corrente da Caixa Econômica: Agência: 1637 / Conta corrente: 000835148057-4 / Operação: 1288
Faça o seu comentário
Comentários