
 | No vídeo mais recente da Boston Dynamics, chamado "Atlas Gets a Grip", que compartilhamos na semana passada, o robô Atlas manipula o mundo ao seu redor, interagindo com objetos e modificando o percurso para atingir seu objetivo: entregar uma sacola de ferramentas para uma pessoa que espera no topo de um andaime de vários andares. Atlas agarra, carrega e joga a bolsa de ferramentas, sobe escadas, pula entre os níveis e empurra um grande bloco de madeira para fora do caminho antes de finalizar com um mortal parafuso de 540 graus. Muito legal! |
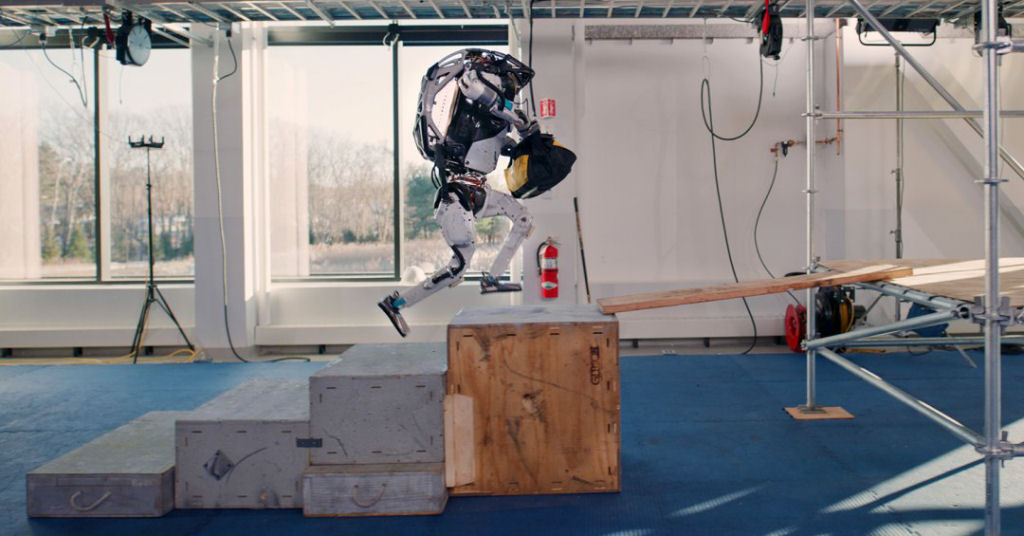
À primeira vista, a rotina parece um pouco diferente dos vídeos anteriores, menos chamativos e mais funcionais. Mas os novos movimentos representam uma progressão natural da pesquisa em andamento, segundo disse Ben Stephens, líder do software de controle do Atlas.
- "Estamos acrescentando novos recursos. Parkour e dança foram exemplos interessantes de locomoção bastante extrema, e agora estamos tentando desenvolver essa pesquisa para também fazer uma manipulação significativa", disse Ben. - "É importante para nós que o robô possa executar essas tarefas com uma certa velocidade humana. As pessoas são muito boas nessas tarefas, o que exigiu grandes atualizações no software de controle."
Para qualquer pessoa que não seja um roboticista, a capacidade de fazer um backflip pode parecer mais impressionante do que pegar e entregar uma sacola de ferramentas. Mas um robô realizando tarefas de manipulação requer uma compreensão mais sutil de seu entorno.
A dança em "Do You Love Me?" (abaixo), por exemplo, era uma sequência praticamente "cega". Os robôs foram programados para repetir os famosos passinhos da dança, sem a percepção necessária para responder ao seu ambiente. Se houvesse qualquer obstáculo eles não saberiam responder de acordo.
Em "Partners in Parkour", a coisa já se complicou um pouco mais, pois a inteligência artificial do Atlas devia perceber e se mover sobre e ao redor de obstáculos fixos. Ou seja, a rotina foi programada, mas o robô devia por si só manter seu equilíbrio por meio de uma variedade de atividades de alta energia e mudanças rápidas.
No último vídeo onde o Atlas faz o papel de ajudante, a capacidades de locomoção e detecção do robô enfrentaram o crítico desafio adicional de não apenas detectar, agarrar e mover objetos com diferentes tamanhos, materiais e pesos, mas também manter o equilíbrio ao negociar esses objetos.
O resultado é incrível, mas a gente costuma não dar o devido valor a como tudo isso é complicado. Por isso este curto clipe de bastidores permite ver como o robô humanóide tenta reagir aos próprios erros e tombos. Note na primeira queda, quando ele tropeça nas própria pernas, que ele tenta se equilibrar dando um passo atrás. Quando cai da tábua, ele tenta levantar. Logo depois do mortal ele consegue se recuperar ao pisar fora do tablado, mas acaba se estabacando de qualquer forma.
Para Ben Stephens, uma das sequências mais impressionantes da última rotina é a abertura, quando Atlas manipula uma grande tábua.
- "Há muita coisa acontecendo e tudo acontece muito rapidamente. Em vez de se virar com cautela Atlas executa um salto de 180 graus enquanto segura a prancha, o que significa que o sistema de controle do robô precisa levar em conta o impulso da prancha para evitar tombar. E então o Atlas o coloca exatamente no lugar certo do mundo, para usar mais tarde", diz Ben.
Empurrar a caixa de madeira da plataforma também é uma tarefa enganosamente complexa: o Atlas precisa gerar força suficiente para fazer a caixa cair, apoiando seu peso no empurrão sem enviar seu próprio corpo para fora da plataforma.
- "Então não estamos apenas pensando em como fazer o robô se mover dinamicamente pelo seu ambiente, agora estamos começando a colocar o Atlas para funcionar e pensar em como o robô deve ser capaz de perceber e manipular objetos ao seu redor", diz Scott Kuindersma, líder da equipe de desenvolvimento do Atlas, no vídeo dos bastidores completo logo abaixo.
Scott, reconhece que é improvável que os robôs mergulhem em seus truques de ginástica nos locais de trabalho.
- "Esta é mais uma demonstração de algumas das novas capacidades de controle do robô e uma conexão divertida com nosso trabalho anterior", diz ele. - "Nossa esperança é que, se pudermos construir a tecnologia fundamental que nos permite criar e adaptar facilmente comportamentos dinâmicos como esses, poderemos aproveitá-la no futuro para realizar trabalhos reais e fisicamente exigentes com agilidade."
Ben diz que os roboticistas ainda estão "muito longe" de criar robôs humanóides que possam lidar rotineiramente com trabalhos pesados e perigosos no mundo real.
- "A manipulação é uma categoria ampla e ainda temos muito trabalho a fazer, mas isso dá uma prévia de onde o campo está indo. Este é o futuro da robótica.", conclui ele.
O MDig precisa de sua ajuda.
Por favor, apóie o MDig com o valor que você puder e isso leva apenas um minuto. Obrigado!
Meios de fazer a sua contribuição:
- Faça um doação pelo Paypal clicando no seguinte link: Apoiar o MDig.
- Seja nosso patrão no Patreon clicando no seguinte link: Patreon do MDig.
- Pix MDig ID: c048e5ac-0172-45ed-b26a-910f9f4b1d0a
- Depósito direto em conta corrente do Banco do Brasil: Agência: 3543-2 / Conta corrente: 17364-9
- Depósito direto em conta corrente da Caixa Econômica: Agência: 1637 / Conta corrente: 000835148057-4 / Operação: 1288
Faça o seu comentário
Comentários